As users of the Westinghouse/Cutler-Hammer/Eaton Digitrip 1150 (DT1150) know, there is no tool available to edit or backup/restore a DT1150 trip unit.
While developing the code to configure this product using the Eaton Device Configuration Management Software (DCMS, or internally to Eaton known as "No Touch / Low Touch Loader or NTLT), we needed a configuration file to save in the cloud for this product.
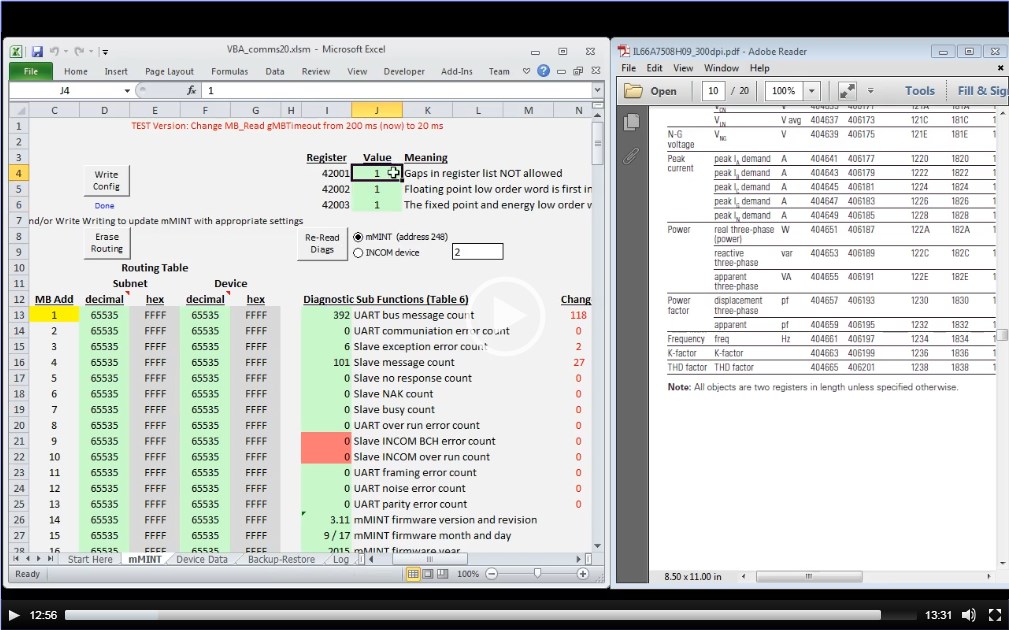
Since none existed, we developed our own based on a simple multi-column CSV (comma separated values) format. Since the file was a bit cryptic to interpret, we also created some macros within Excel VBA that would convert the file into something more readable.
Click on the link below to download the file and an example DT1150 configuration file.
https://pps2.com/smf/index.php?action=dlattach;topic=238.0;attach=136
While developing the code to configure this product using the Eaton Device Configuration Management Software (DCMS, or internally to Eaton known as "No Touch / Low Touch Loader or NTLT), we needed a configuration file to save in the cloud for this product.
Since none existed, we developed our own based on a simple multi-column CSV (comma separated values) format. Since the file was a bit cryptic to interpret, we also created some macros within Excel VBA that would convert the file into something more readable.
Click on the link below to download the file and an example DT1150 configuration file.
https://pps2.com/smf/index.php?action=dlattach;topic=238.0;attach=136